








设施农业机器人导航关键技术研究进展与展望(《智慧农业(中英文)2024年第5期》)
- 创业
- 2025-01-16 14:05:06
- 14
引用格式:
何勇, 黄震宇, 杨宁远, 李禧尧, 王玉伟, 冯旭萍. 设施农业机器人导航关键技术研究进展与展望[J]. 智慧农业(中英文), 2024, 6(5): 1-19.
Citation:HE Yong, HUANG Zhenyu, YANG Ningyuan, LI Xiyao, WANG Yuwei, FENG Xuping. Research Progress and Prospects of Key Navigation Technologies for Facility Agricultural Robots[J]. Smart Agriculture, 2024, 6(5): 1-19.
设施农业机器人导航关键技术研究进展与展望
何勇1, 黄震宇1, 杨宁远1, 李禧尧1, 王玉伟2, 冯旭萍1,3*
(1.浙江大学 生物系统工程与食品科学学院,浙江杭州 310058,中国;2.安徽农业大学 工学院,安徽合肥 230036,中国;3.浙江大学 新农村发展研究院,浙江杭州 310058,中国)
摘要:
[目的/意义]随着科学技术的快速发展和劳动力成本的不断提高,机器人在设施农业领域的应用越来越广泛。设施环境复杂多样,如何让机器人实现稳定、精准、快速地导航仍然是当前需要解决的问题。
[进展]本文基于设施农业智能机器人的自动导航关键技术展开综述。在自主定位与地图构建方面,详细介绍了信标定位、惯性定位、即时定位与建图技术,以及融合定位方法。其中,依据使用的传感器不同,即时定位与建图技术可进一步划分为视觉、激光和融合三种不同类型。在全局路径规划方面,探讨了点到点局部路径规划和全局遍历路径规划在设施农业中的应用。针对规划目标数量的不同,详细介绍了单目标路径规划和多目标路径规划。此外,在机器人的自动避障技术方面,讨论了一系列设施农业中常用的避障控制算法。
[结论/展望] 总结了当前设施农业智能机器人自动导航技术面临的挑战,包括复杂环境、遮挡严重、成本高、作业效率低、缺乏标准化平台和公开数据集等问题。未来研究应重点关注多传感器融合、先进算法优化、多机器人协同作业,以及数据标准化与共享平台的建设。这些方向将有助于提升机器人在设施农业中的导航精度、效率和适应性,为智能农业的发展提供参考和建议。
关键词:设施农业机器人;导航;定位;路径规划;避障
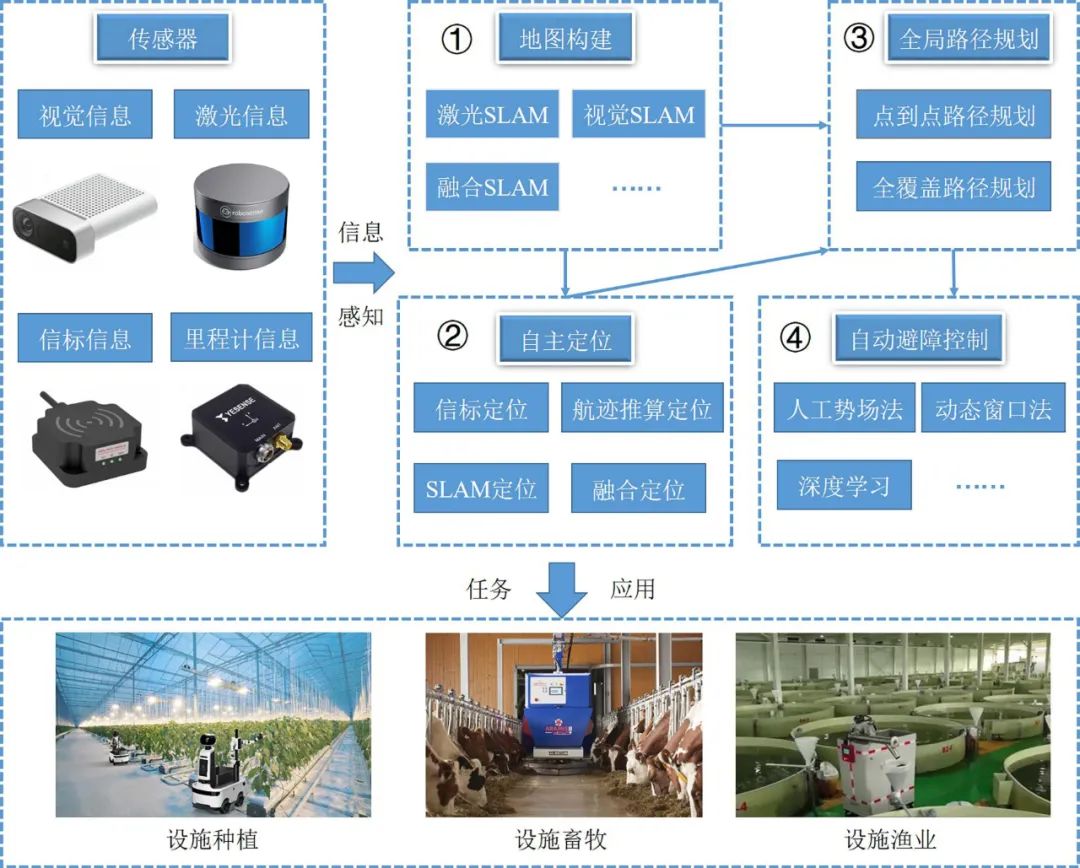
Fig. 1 Navigation key technologies for facility agricultural robots
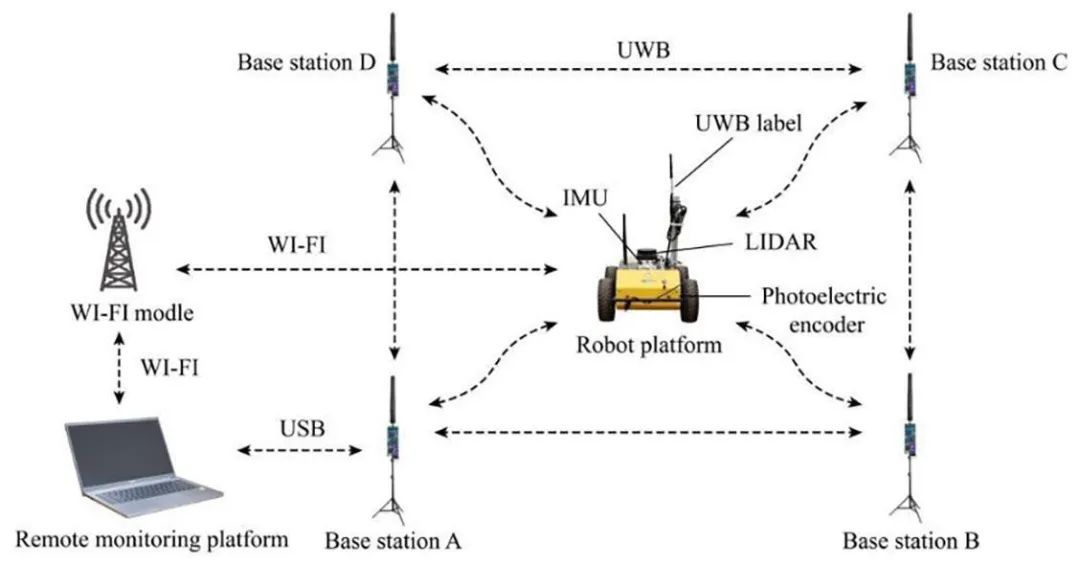
Fig. 2 Implementation forms of UWB localization
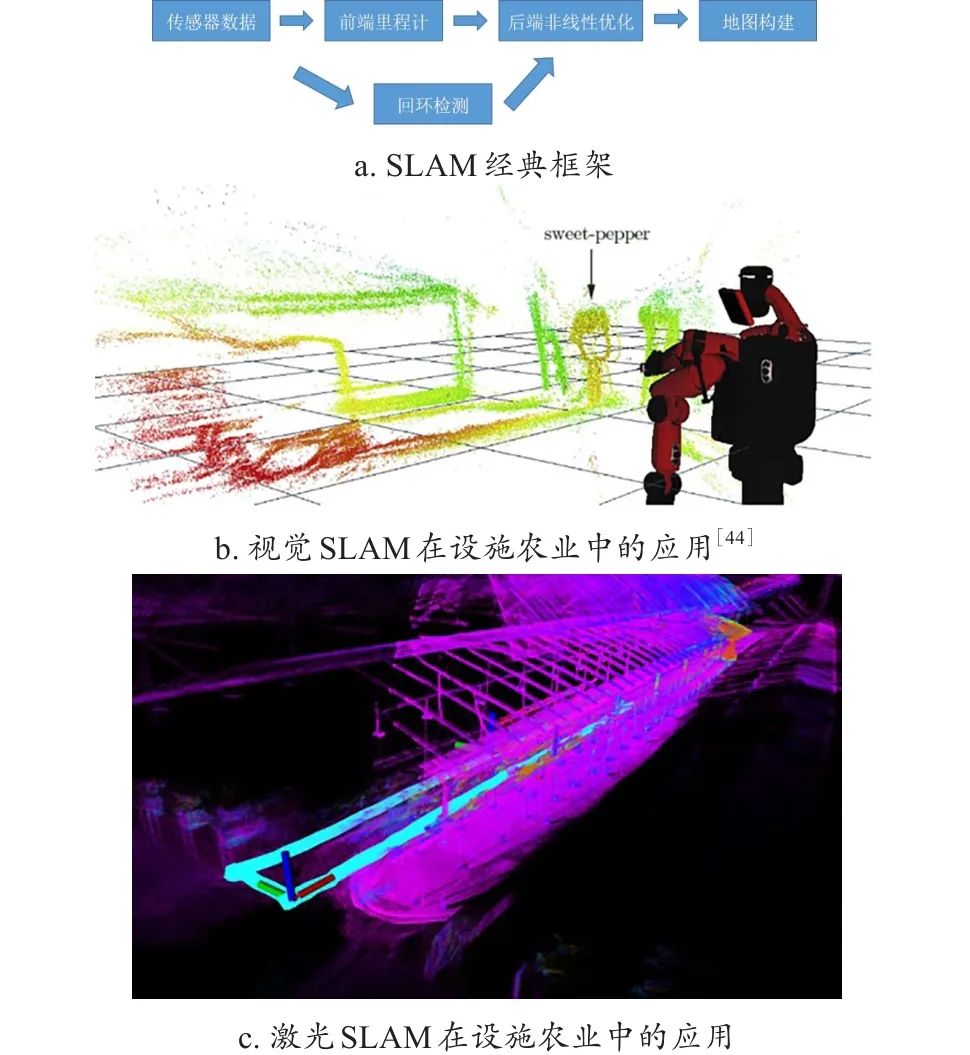
Fig. 3 The application of SLAM localization in facility agriculture
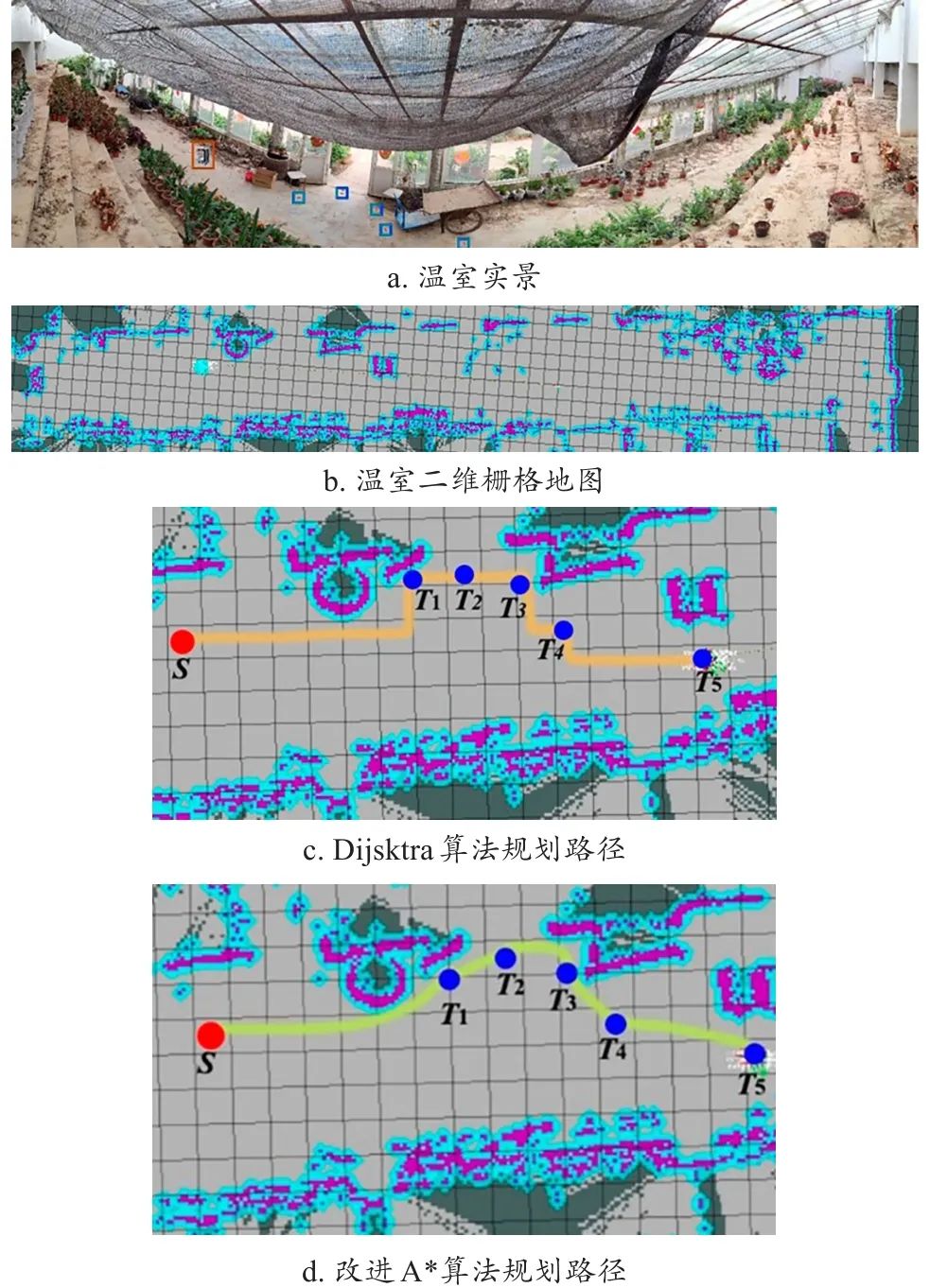
Fig. 4 Improvement of the A* algorithm in greenhouse scenario
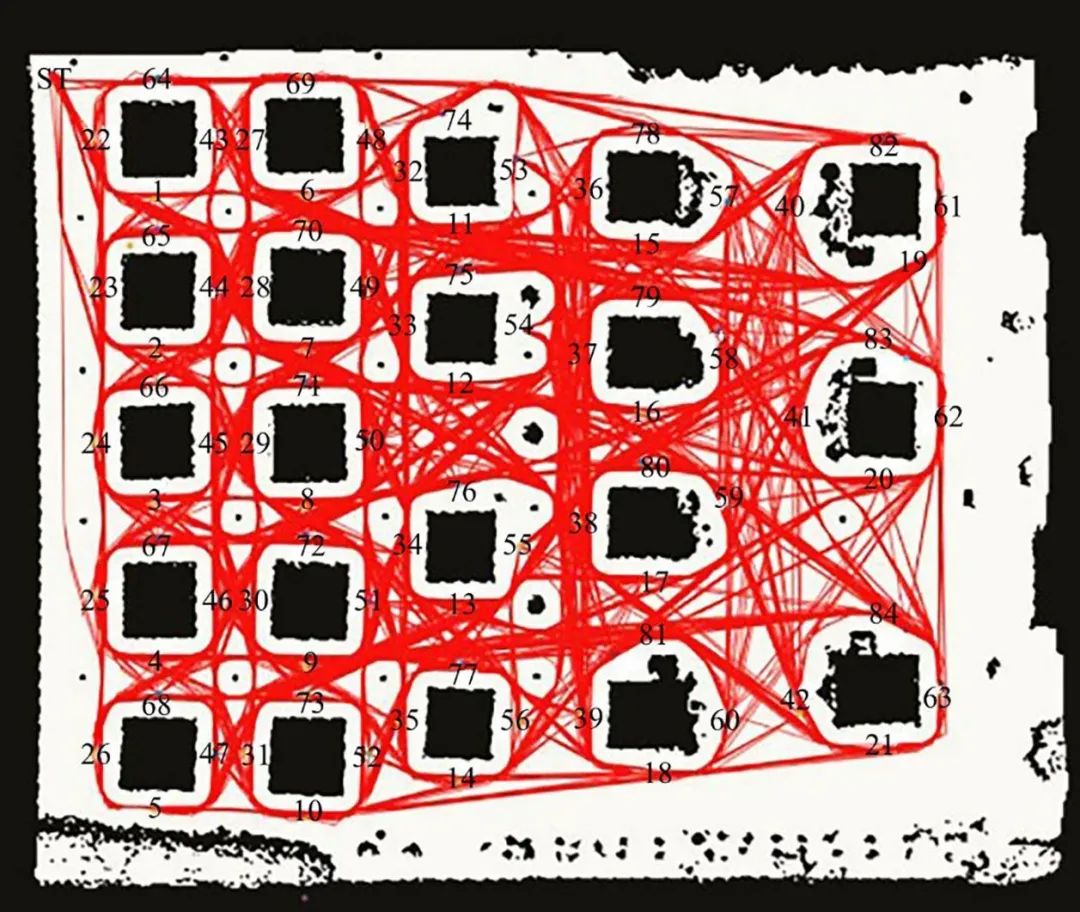
Fig. 5 Global path planning for multiple points and multiple targets inside greenhouses
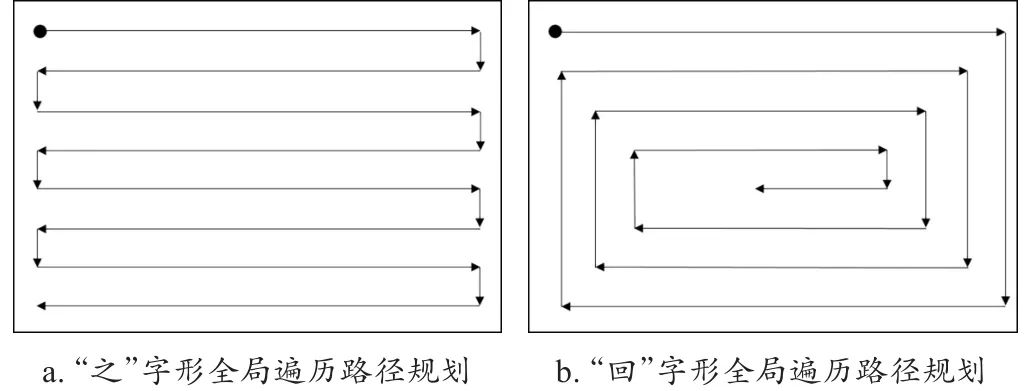
Fig. 6 Two classic global traversal path planning methods in facility agriculture
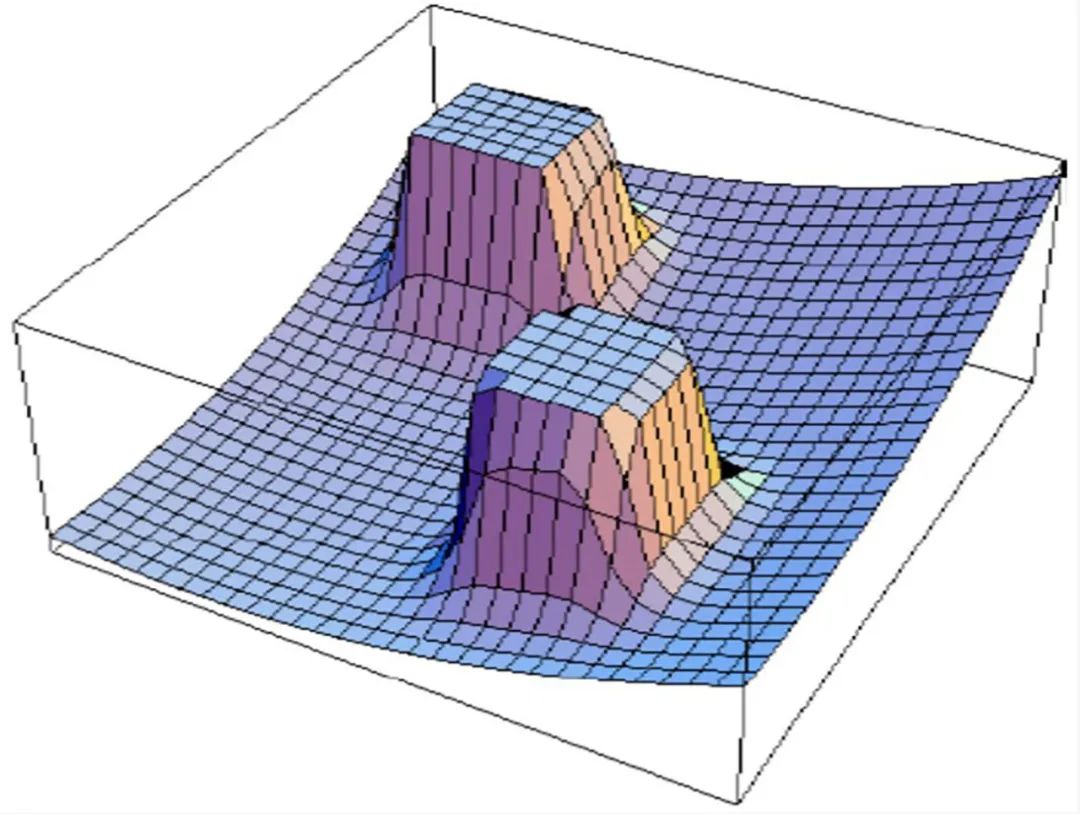
Fig. 7 Three-dimensional diagram of artificial potential field for obstacle avoidance
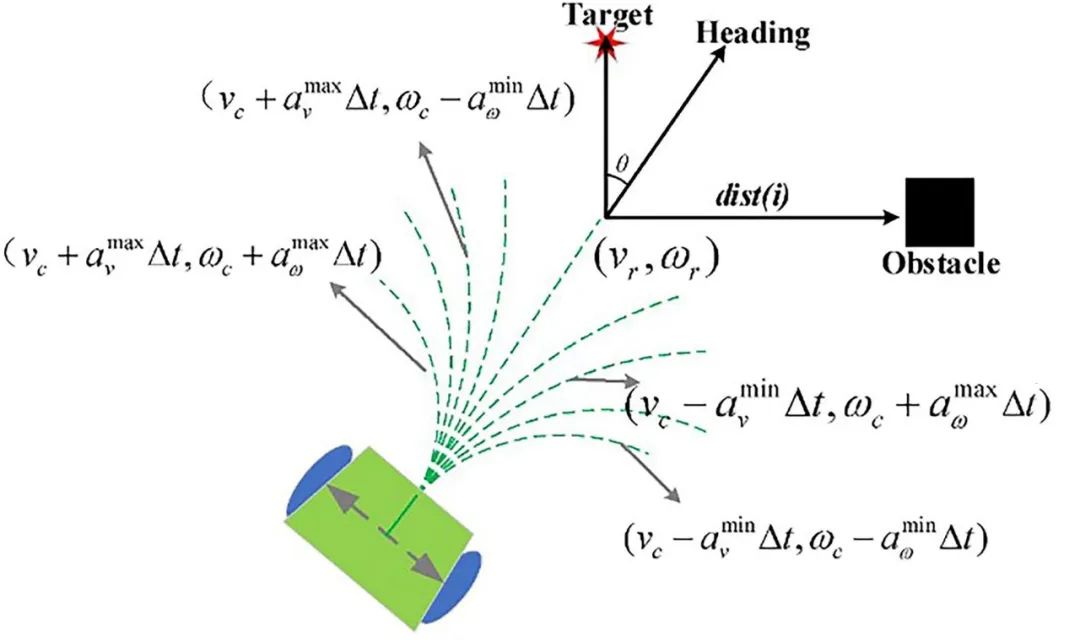
Fig. 8 Velocity sampling based on dynamic window approach
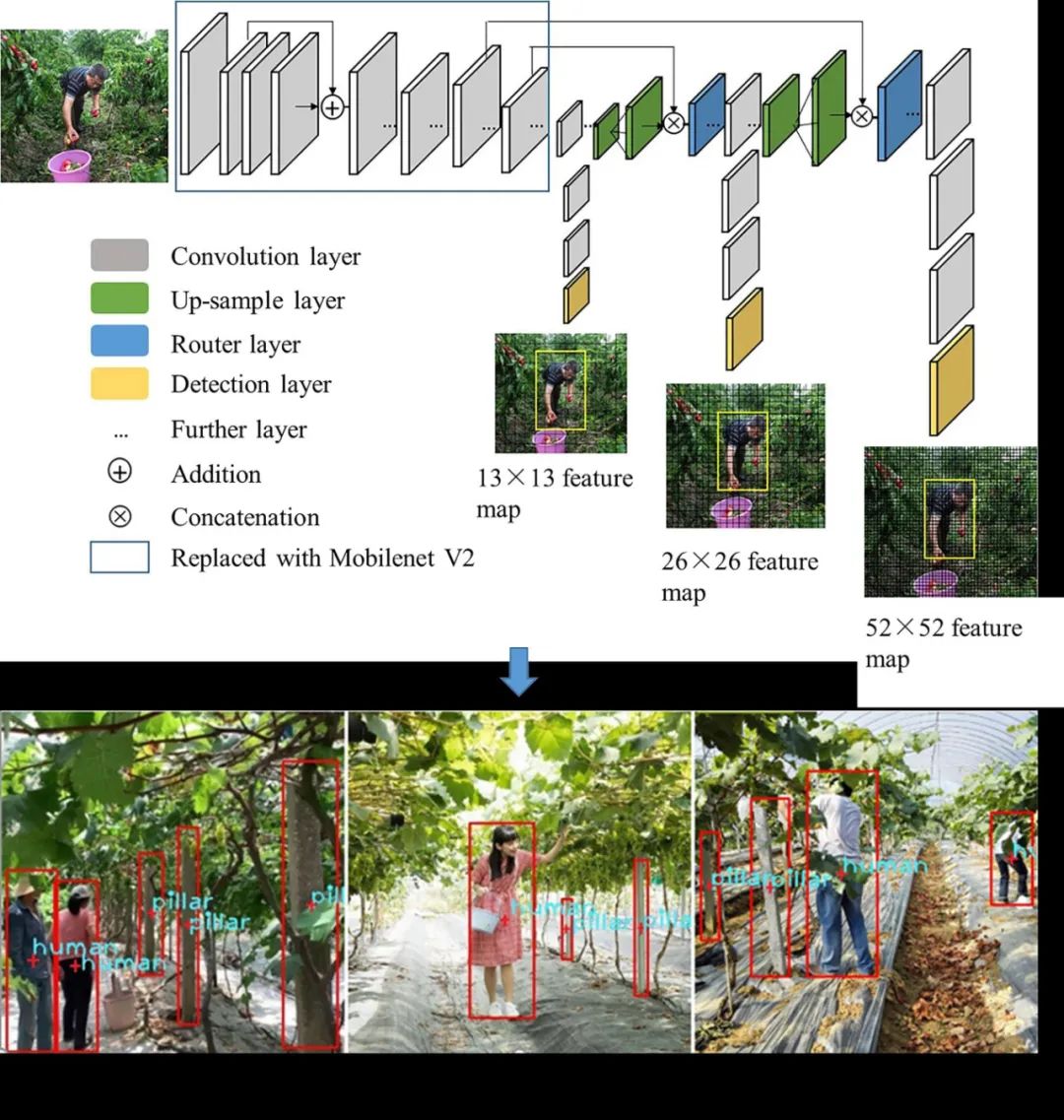
Fig. 9 Deep learning application in obstacle avoidance
作者简介

何勇 教授
何勇,浙江大学求是特聘教授,浙大数字农业农村研究中心主任、农业农村部光谱检测重点实验室主任,国务院农业工程学科评议组秘书长、教育部农业工程教指委委员。俄罗斯工程院外籍院士、国际农业与生物系统工程科学院Fellow、2016-2018 科睿唯安全球高被引科学家、ELSEVIER中国高被引学者、2022年斯坦福大学 “全球前2%顶尖科学家榜单”。2017年2月26日央视“对话”节目特邀嘉宾。主持国家863、自然科学基金等50 余项。发表SCI 论文400 余篇,授权国内外发明专利180 余件,出版专著和教材20 多部。第一完成人获国家科技进步二等奖1项、教育部科技进步一等奖2 项、浙江省科技进步一等奖4 项、第十届大北农智慧农业奖。担任《Computers and Electronics in Agriculture》主编。获国务院特殊津贴,国家百千万人才、全国科技优秀工作者、863主题和首席专家、国家教学名师。担任长三角助力创新联盟副主席兼秘书长,浙江智能制造学会联合体主席、浙江省未来农场产业联盟执行主席、浙江省数字乡村国家试点县评审专家组组长。

冯旭萍 副研究员
冯旭萍,浙江大学生物系统工程与食品科学学院/新农村发展研究院副研究员,法国里尔一大和浙江大学双博士。Plant Phenomics青年编委、Processes期刊客座编辑。长期从事数字农业、农业物联网和作物表型信息获取相关研究,近5年以第一作者或通讯作者发表在Nature Plants等期刊发表高水平论文20多篇。获得国内外发明专利10多项,主持国家自然科学基金、十四五重点研发子课题、浙江省重点研发子课题等多个课题,获浙江省科技进步一等奖、广东省科技进步二等奖和FAO全球农创客大赛金奖。
来源:《智慧农业(中英文)》2024年第5期
(转自:智慧农业期刊)
相关文章
热门文章

乐购陷入“变态经理”骗局,承诺“750英镑折扣券”
2024-12-28
以色列在加沙北部的新策略引发了人们对种族清洗运动的担忧
2024-12-28
“可爱的”爷爷在向家人隐瞒秘密后被发现死在停车场
2024-12-28
伊朗选手拜特·萨耶的残奥会金牌因悬挂“令人反感”的国旗而被剥夺
2024-12-28
医生的简单饮食,让你在短短四周内减掉一英寸的腰围
2024-12-28
杜丽莎取消关注《我是名人》,因为秘密不和的谣言四起,她最终被冷落
2024-12-28
在《龙珠火花零》多人游戏发行几天后,作弊问题浮出水面
2024-12-28
听听宾夕法尼亚州伊利市企业主和选民的看法。他们可以帮助决定白宫。
2024-12-28
有话要说...